The holders for the vacuum nozzles are now fitted to the pick and place machine. Our original plan was to have the motors mounted higher as in previous posts and use a magnetic holder to attach the different size nozzles to the picker heads.
Unfortunately, our Axminster lathe isn’t precise enough to meet the tolerances we require and despite several attempts, we haven’t been able to machine and drill the nozzle holders so they have less than 0.25mm of rotational movement.
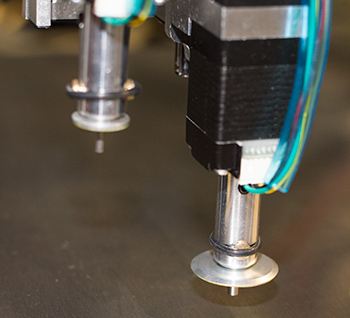
This required a new approach to the nozzle holders and we decided to move the rotation stepper motors further down the Z-axis bearing (needed to redesign and mill new plates) and then use a commercial 5mm to 5mm aluminium coupler to attach to the stepper motors output shaft and to the various sizes of nozzles we have.
To allow us to easily change the nozzles each coupler has been fitted with two very small brass retaining clips which have a shallow point on the end which aligns with two holes already in each of the picker nozzles.
These are held in place with O-rings to act as basic springs and this allows us to change the nozzles by rotating to disengage the retaining clips and then pulling down to remove the nozzle.
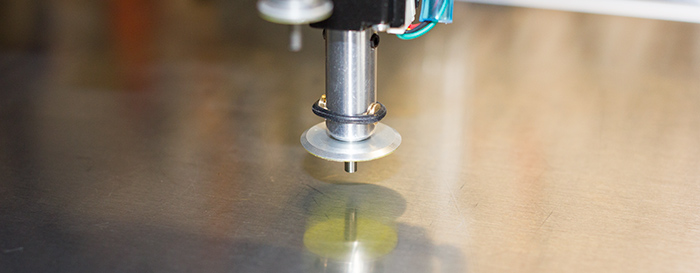
The photo shows one of the larger nozzles fitted with the end of the retaining clip and O-ring on the right stepper motor.
Replacement nozzles are fitted by simply pushing up into the coupler until the retaining pin clips engage the holes in the nozzle.
The nozzles are approx. 0.5mm down from the base of the coupler which is held with the clips and can move up and return to its original position if the Z-axis moves down too far.
This will hopefully avoid any broken components when placed due to the warping of the PCB boards.
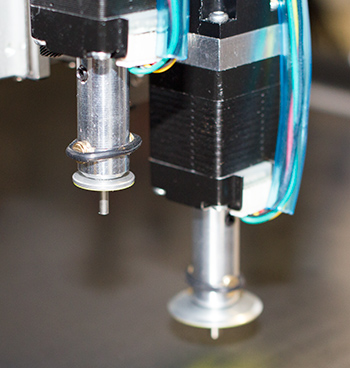
The photo shows one of the smaller nozzles fitted with the end of the retaining clip and O-ring on the left stepper motor.
Comments